Visualization of Dataset¶
Get a GraspNet instance.
####################################################################
graspnet_root = '/home/gmh/graspnet' # ROOT PATH FOR GRASPNET
####################################################################
from graspnetAPI import GraspNet
# initialize a GraspNet instance
g = GraspNet(graspnet_root, camera='kinect', split='train')
Show grasp labels on a object.
# show object grasps
g.showObjGrasp(objIds = 0, show=True)

Show 6D poses of objects in a scene.
# show 6d poses
g.show6DPose(sceneIds = 0, show = True)

Show Rectangle grasp labels in a scene.
# show scene rectangle grasps
g.showSceneGrasp(sceneId = 0, camera = 'realsense', annId = 0, format = 'rect', numGrasp = 20)

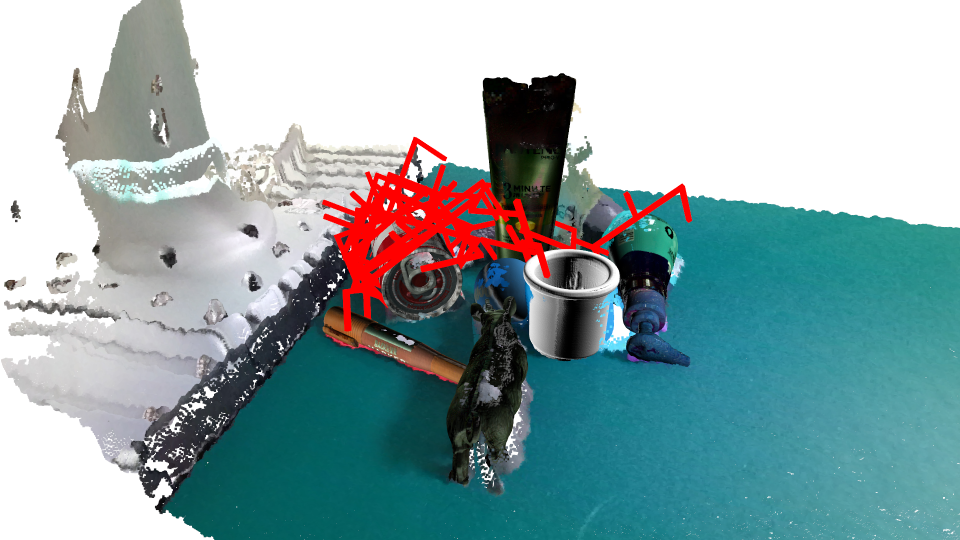
Show 6D grasp labels in a scene.
# show scene 6d grasps(You may need to wait several minutes)
g.showSceneGrasp(sceneId = 4, camera = 'kinect', annId = 2, format = '6d')